LightFlowをWindows7で動かす
- Lightflow
- by yuichirou yokomakura
- 2010.08.09 Monday 18:33
Windows7で動くかどうか、インストールしてみた。
64ビットOSに新たにPytohn1.5.2を入れ、きちんとパスを環境変数に記入してあげる。
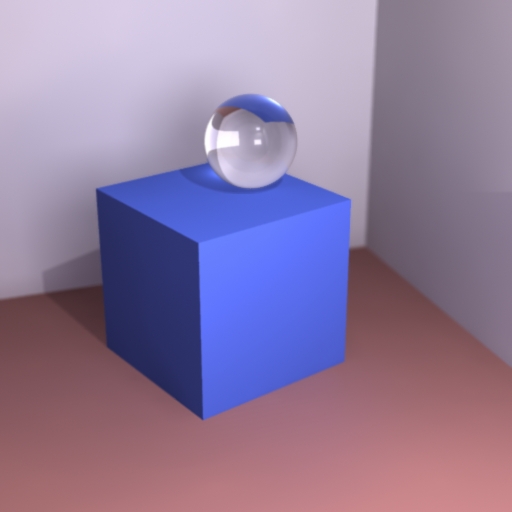
Rendering with Radianceの中に出てくるサンプルファイルをLightflowで記述している。当時はレンダリングに時間かかっていましたが、マシンが速いとうれしい。
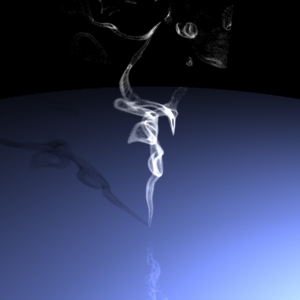
2000年の頃、以下の煙のアニメーションをペンティアム1GHzマシン使って1枚出すのに、2〜5分くらいかかっていたのを思い出す。150枚レンダリングするのに、30分で終わった。1枚平均12秒。マシンの進歩に驚く。ありがとうございます。
なお、通常、Python2.6を使うのであれば、環境変数をきちんと指定しておく。
c:\python26;c:\python26\Scripts
Python2.6で動いてくれれば、いいんだけど、今となってはさびしいところです。
64ビットOSに新たにPytohn1.5.2を入れ、きちんとパスを環境変数に記入してあげる。
Rendering with Radianceの中に出てくるサンプルファイルをLightflowで記述している。当時はレンダリングに時間かかっていましたが、マシンが速いとうれしい。
2000年の頃、以下の煙のアニメーションをペンティアム1GHzマシン使って1枚出すのに、2〜5分くらいかかっていたのを思い出す。150枚レンダリングするのに、30分で終わった。1枚平均12秒。マシンの進歩に驚く。ありがとうございます。
なお、通常、Python2.6を使うのであれば、環境変数をきちんと指定しておく。
c:\python26;c:\python26\Scripts
Python2.6で動いてくれれば、いいんだけど、今となってはさびしいところです。