<< 4/9 >>
Lightflowでレンダリング中エラー
abnormal program termination
Lightflowでレンダリング中、以下のようなエラーが出た。
Microsoft Visual C++ Runtime Library
Runtime Error!
Program: C:\Program Files(x86)\python\python.exe
abnormal program termination
Rendering 720 x 400 pixels
00:00:42 - 73.2%
Error (LfFault):
LfSaveTGABlock()
error writing "to2_8f.tga"
続行するには何かキーを押してください . . .
tmp_ve_a03400などテンポラリーファイルが残ってしまう。
気になるので削除した。
ViX.exe を終了してから、Lightflowを起動するとうまく走ります。
59秒かかった。
使い方としては面倒だけど、いろいろと実験できて面白い。
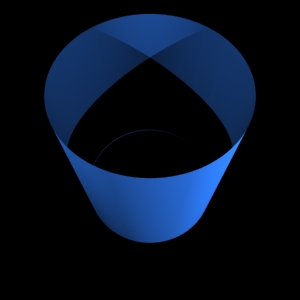
Lightflowで円柱を示す
Lightflowのcylinderには、ふたがしてない。RenderManで用意されているプリミティブと同じだ。X軸中心に30度傾ける。
s.transformBegin( transform().rotationAroundX( pi*30.0/180 )
Pythonで除算する時は、小数点をつけておかないと正しく計算しないから注意する必要がある。
#! /usr/bin/env python
from lightflowPM import *
from math import *
s = scene()
s.lightOn( s.newLight( "point", [ "position", vector3( 5.0, -5.0, 3.0 ), "color", vector3( 300.0, 300.0, 300.0 ) ] ) )
s.lightOn( s.newLight( "point", [ "position", vector3( -5.0, -5.0, 3.0 ), "color", vector3( 300.0, 300.0, 300.0 ) ] ) )
s.lightOn( s.newLight( "point", [ "position", vector3( 5.0, -5.0, -3.0 ), "color", vector3( 300.0, 300.0, 300.0 ) ] ) )
plastic = s.newMaterial( "standard", [ "kc", vector3( 0.096, 0.252, 0.504 ), "kd", 0.5, "km", 0.1 ] )
s.materialBegin( plastic )
s.transformBegin( transform().rotationAroundX( pi*30.0/180 ) )
s.addObject( s.newObject( "cylinder", [ "radius", 1.0 ,"height",2.4] ) )
s.transformEnd()
s.materialEnd()
saver = s.newImager( "tga-saver", [ "file", "bool01.tga" ] )
s.imagerBegin( saver )
camera = s.newCamera( "pinhole", [ "eye", vector3( 0, -4, 3 ),
"aim", vector3( 0, 1, 0 ),
"aa-samples", 2,5
] )
s.imagerEnd()
s.render( camera, 300, 300 )
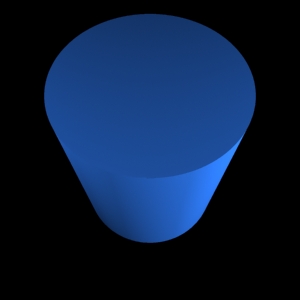
Lightflow円柱にふたをする
disc,cylinderを使って、ふたをした円柱を原点で作成する。
capをしてグループ化してみた。
hole = s.newObject( "boundary", [ "surfaces", cyl, cap1, cap2 ] )
これでひとつにまとめ、レンダリングで画面に表示するためには、
s.addObject(hole)を行う。
サンプルファイルは次のようになる。
#! /usr/bin/env python
from lightflowPM import *
from math import *
s = scene()
s.lightOn( s.newLight( "point", [ "position", vector3( 5.0, -5.0, 3.0 ), "color", vector3( 300.0, 300.0, 300.0 ) ] ) )
s.lightOn( s.newLight( "point", [ "position", vector3( -5.0, -5.0, 3.0 ), "color", vector3( 300.0, 300.0, 300.0 ) ] ) )
s.lightOn( s.newLight( "point", [ "position", vector3( 5.0, -5.0, -3.0 ), "color", vector3( 300.0, 300.0, 300.0 ) ] ) )
plastic = s.newMaterial( "standard", [ "kc", vector3( 0.096, 0.252, 0.504 ), "kd", 0.5, "km", 0.1 ] )
s.materialBegin( plastic )
s.transformBegin( transform().rotationAroundX( pi*15.0/180 ) )
s.transformBegin( transform().translation( vector3( 0, 0, 2.4 ) ) )
cap1=s.newObject( "disc", [ "radius", 1.0 ] )
s.transformEnd()
s.transformBegin( transform().translation( vector3( 0, 0, 0 ) ) )
cap2=s.newObject( "disc", [ "radius", 1.0 ] )
s.transformEnd()
cyl=s.newObject( "cylinder", [ "radius", 1.0 ,"height",2.4] )
s.transformEnd()
hole = s.newObject( "boundary", [ "surfaces", cyl, cap1, cap2 ] )
s.materialEnd()
s.addObject(hole)
saver = s.newImager( "tga-saver", [ "file", "bool02.tga" ] )
s.imagerBegin( saver )
camera = s.newCamera( "pinhole", [ "eye", vector3( 0, -4, 3 ),
"aim", vector3( 0, 1, 0 ),
"aa-samples", 2,5
] )
s.imagerEnd()
s.render( camera, 300, 300 )
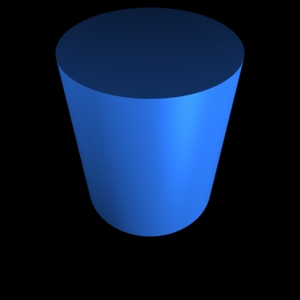
X軸中心に角度を-60度傾けてみた。

X軸中心に角度を30度傾けてみた。
ありがとうございます。
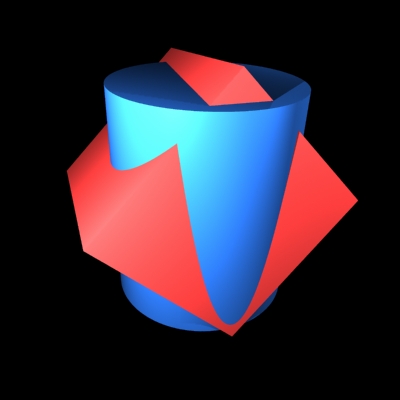
Lightflow円柱と立方体
ブーリアン演算をするために、円柱は傾けたまま、立方体は回転させてみた。元ねたは、「はじめてのCG」POV-Ray本を参考にした。
まずは円柱と立方体を表示する。
サンプルファイルはこちら
#! /usr/bin/env python
from lightflowPM import *
from math import *
s = scene()
s.lightOn( s.newLight( "point", [ "position", vector3( 5.0, -5.0, 3.0 ), "color", vector3( 300.0, 300.0, 300.0 ) ] ) )
s.lightOn( s.newLight( "point", [ "position", vector3( -3.0, -3.0, 3.0 ), "color", vector3( 300.0, 300.0, 300.0 ) ] ) )
s.lightOn( s.newLight( "point", [ "position", vector3( 3.0, 3.0, 3.0 ), "color", vector3( 300.0, 300.0, 300.0 ) ] ) )
plastic = s.newMaterial( "standard", [ "kc", vector3( 0.096, 0.252, 0.504 ), "kd", 0.5, "km", 0.1 ] )
#cylinder
s.materialBegin( plastic )
s.transformBegin( transform().rotationAroundX( pi*5.0/180 ) )
s.transformBegin( transform().translation( vector3( 0, 0, 2.4 ) ) )
cap1=s.newObject( "disc", [ "radius", 1.0 ] )
s.transformEnd()
s.transformBegin( transform().translation( vector3( 0, 0, 0 ) ) )
cap2=s.newObject( "disc", [ "radius", 1.0 ] )
s.transformEnd()
cyl=s.newObject( "cylinder", [ "radius", 1.0 ,"height",2.4] )
s.transformEnd()
s.materialEnd()
#cylinder with double caps
hole = s.newObject( "boundary", [ "surfaces", cyl, cap1, cap2 ] )
plastic2 = s.newMaterial( "standard", [ "kc", vector3(0.556863,0.137255,0.137255), "kd", 0.5, "km", 0.1 ] )
#box
s.materialBegin( plastic2 )
s.transformBegin( transform().translation( vector3( 0, 0, 1.2 ) ) )
s.transformBegin( transform().rotationAroundY( pi*45.0/180 ) )
s.addObject( s.newObject( "box", [ "position",vector3( -1.0, -1.0, -1.0 ),vector3( 1.0, 1.0, 1.0 )] ) )
s.transformEnd()
s.transformEnd()
s.materialEnd()
s.addObject(hole)
saver = s.newImager( "tga-saver", [ "file", "bool03.tga" ] )
s.imagerBegin( saver )
camera = s.newCamera( "pinhole", [ "eye", vector3( -1.5, -4, 3 ),
"aim", vector3( 0, 0, 1 ),
"aa-samples", 2,5
] )
s.imagerEnd()
s.render( camera, 400, 400 )
面白いですね。ありがとうございます。
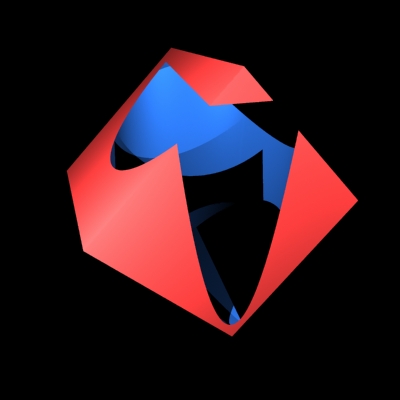
Lightflowブーリアン演算その1
立方体からふたつき円柱を使ってくり貫いた。
csg1 = s.newObject( "solid",[ "type", "difference",
"solids", box1, hole ] )
"difference"差集合を表す。
box1-holeを行っている。
サンプルファイルはこちら
#! /usr/bin/env python
from lightflowPM import *
from math import *
s = scene()
s.lightOn( s.newLight( "point", [ "position", vector3( 5.0, -5.0, 3.0 ), "color", vector3( 300.0, 300.0, 300.0 ) ] ) )
s.lightOn( s.newLight( "point", [ "position", vector3( -3.0, -3.0, 3.0 ), "color", vector3( 300.0, 300.0, 300.0 ) ] ) )
s.lightOn( s.newLight( "point", [ "position", vector3( 3.0, 3.0, 3.0 ), "color", vector3( 300.0, 300.0, 300.0 ) ] ) )
plastic = s.newMaterial( "standard", [ "kc", vector3( 0.096, 0.252, 0.504 ), "kd", 0.5, "km", 0.1 ] )
#cylinder
s.materialBegin( plastic )
s.transformBegin( transform().rotationAroundX( pi*5.0/180 ) )
s.transformBegin( transform().translation( vector3( 0, 0, 2.4 ) ) )
cap1=s.newObject( "disc", [ "radius", 1.0 ] )
s.transformEnd()
s.transformBegin( transform().translation( vector3( 0, 0, 0 ) ) )
cap2=s.newObject( "disc", [ "radius", 1.0 ] )
s.transformEnd()
cyl=s.newObject( "cylinder", [ "radius", 1.0 ,"height",2.4] )
s.transformEnd()
s.materialEnd()
#cylinder with double caps
hole = s.newObject( "boundary", [ "surfaces", cyl, cap1, cap2 ] )
plastic2 = s.newMaterial( "standard", [ "kc", vector3(0.556863,0.137255,0.137255), "kd", 0.5, "km", 0.1 ] )
#box1
s.materialBegin( plastic2 )
s.transformBegin( transform().translation( vector3( 0, 0, 1.2 ) ) )
s.transformBegin( transform().rotationAroundY( pi*45.0/180 ) )
box1=s.newObject( "box", [ "position",vector3( -1.0, -1.0, -1.0 ),vector3( 1.0, 1.0, 1.0 )] )
s.transformEnd()
s.transformEnd()
s.materialEnd()
csg1 = s.newObject( "solid",
[ "type", "difference",
"solids", box1, hole ] )
s.addObject(csg1)
saver = s.newImager( "tga-saver", [ "file", "bool04.tga" ] )
s.imagerBegin( saver )
camera = s.newCamera( "pinhole", [ "eye", vector3( -1.5, -4, 3 ),
"aim", vector3( 0, 0, 1 ),
"aa-samples", 2,5
] )
s.imagerEnd()
s.render( camera, 400, 400 )
逆にすれば形も変わる。
csg1 = s.newObject( "solid",[ "type", "difference",
"solids", hole, box1 ] )
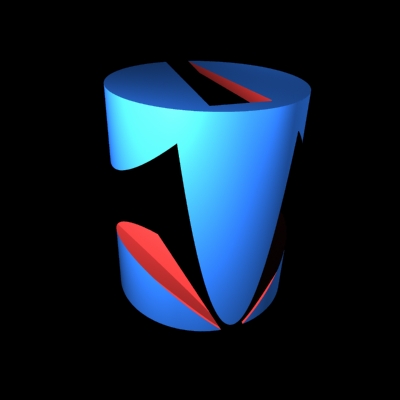
ありがとうございます。
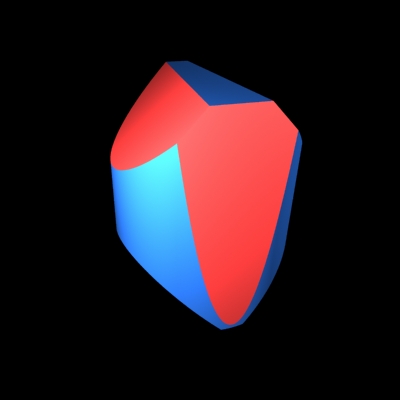
Lightflowブーリアン演算その2
ブーリアン演算を使って、お互いの物体の重なっている部分を表示するには、"intersection"を使う。Lightflowの設定では3つの物体でもまとめて計算できるようだ。便利かも。
csg1 = s.newObject( "solid",
[ "type", "intersection",
"solids", box1, hole ] )
以下はサンプルファイル参考にしてみてください。
#! /usr/bin/env python
from lightflowPM import *
from math import *
s = scene()
s.lightOn( s.newLight( "point", [ "position", vector3( 5.0, -5.0, 3.0 ), "color", vector3( 300.0, 300.0, 300.0 ) ] ) )
s.lightOn( s.newLight( "point", [ "position", vector3( -3.0, -3.0, 3.0 ), "color", vector3( 300.0, 300.0, 300.0 ) ] ) )
s.lightOn( s.newLight( "point", [ "position", vector3( 3.0, 3.0, 3.0 ), "color", vector3( 300.0, 300.0, 300.0 ) ] ) )
plastic = s.newMaterial( "standard", [ "kc", vector3( 0.096, 0.252, 0.504 ), "kd", 0.5, "km", 0.1 ] )
#cylinder
s.materialBegin( plastic )
s.transformBegin( transform().rotationAroundX( pi*5.0/180 ) )
s.transformBegin( transform().translation( vector3( 0, 0, 2.4 ) ) )
cap1=s.newObject( "disc", [ "radius", 1.0 ] )
s.transformEnd()
s.transformBegin( transform().translation( vector3( 0, 0, 0 ) ) )
cap2=s.newObject( "disc", [ "radius", 1.0 ] )
s.transformEnd()
cyl=s.newObject( "cylinder", [ "radius", 1.0 ,"height",2.4] )
s.transformEnd()
s.materialEnd()
#cylinder with double caps
hole = s.newObject( "boundary", [ "surfaces", cyl, cap1, cap2 ] )
plastic2 = s.newMaterial( "standard", [ "kc", vector3(0.556863,0.137255,0.137255), "kd", 0.5, "km", 0.1 ] )
#box1
s.materialBegin( plastic2 )
s.transformBegin( transform().translation( vector3( 0, 0, 1.2 ) ) )
s.transformBegin( transform().rotationAroundY( pi*45.0/180 ) )
box1=s.newObject( "box", [ "position",vector3( -1.0, -1.0, -1.0 ),vector3( 1.0, 1.0, 1.0 )] )
s.transformEnd()
s.transformEnd()
s.materialEnd()
csg1 = s.newObject( "solid",
[ "type", "intersection",
"solids", box1, hole ] )
s.addObject(csg1)
saver = s.newImager( "tga-saver", [ "file", "bool04in.tga" ] )
s.imagerBegin( saver )
camera = s.newCamera( "pinhole", [ "eye", vector3( -1.5, -4, 3 ),
"aim", vector3( 0, 0, 1 ),
"aa-samples", 2,5
] )
s.imagerEnd()
s.render( camera, 400, 400 )
Lightflowで立方体生成関数をつくる その1
plasticマテリアルを以下のようにリスト化した
col=[plastic,plastic2,plastic3,plastic4,plastic5,plastic6]
これで、col[0]からcol[5]まで6つのマテリアルが呼び出せる。
Pythonで関数は、def hoge:で書いていく。
Lightflow内のboxの位置とリスト化したマテリアルを引数として渡して、立方体を生成するように以下のように定義した。
#関数定義 ボックスの位置とリストcolのインデックス番号0から5まで
def boxpos(x0,y0,z0,c):
s.materialBegin( col[c] )
s.transformBegin( transform().translation( vector3(x0,y0,z0)))
s.addObject( s.newObject( "box", [ "position",vector3( -1.0, -1.0, -1.0 ),vector3( 1.0, 1.0, 1.0 )] ) )
s.transformEnd()
s.materialEnd()
よって、一行
boxpos(0,0,0,0)
boxpos(-3.0,0,0,1)
boxpos(-3,-3,0,3)
boxpos(0,-3,0,4)
のように記述してあげると良い。
以下はサンプルファイルである。
#! /usr/bin/env python
#box_def.py
from lightflowPM import *
from math import *
import colorinc
s = scene()
s.lightOn( s.newLight( "point", [ "position", vector3( 5.0, -5.0, 4.0 ), "color", vector3( 300.0, 300.0, 300.0 ) ] ) )
s.lightOn( s.newLight( "ambient", [ "color", vector3( 0.3, 0.3, 0.3 ) ] ) ) #環境光を加える。
plastic = s.newMaterial( "standard",[ "kc", colorinc.Brown,"kd",0.66 ] ) #
plastic2 = s.newMaterial( "standard",[ "kc", colorinc.CadetBlue,"kd",0.66 ] ) #
plastic3 = s.newMaterial( "standard",[ "kc", colorinc.Coral,"kd",0.66 ] ) #
plastic4 = s.newMaterial( "standard",[ "kc", colorinc.VLightGray,"kd",0.66 ] ) #
plastic5 = s.newMaterial( "standard",[ "kc", colorinc.Aquamarine,"kd",0.66 ] ) #
plastic6 = s.newMaterial( "standard",[ "kc", colorinc.BlueViolet,"kd",0.66 ] ) #
#plasticをリスト化した
col=[plastic,plastic2,plastic3,plastic4,plastic5,plastic6]
check_ground=s.newPattern("check",["color",vector3( 0.2, 0.4, 0.6 ),"scale",0.025])
ground=s.newMaterial( "standard",[ "kc", check_ground,"kc",vector3( 1.0, 1.0, 1.0 ),"ka",check_ground ] ) #チェック青と白
#関数定義 ボックスの位置とリストcolのインデックス番号0から5まで
def boxpos(x0,y0,z0,c):
s.materialBegin( col[c] )
s.transformBegin( transform().translation( vector3(x0,y0,z0)))
s.addObject( s.newObject( "box", [ "position",vector3( -1.0, -1.0, -1.0 ),vector3( 1.0, 1.0, 1.0 )] ) )
s.transformEnd()
s.materialEnd()
#Brown box
boxpos(0,0,0,0)
#CadetBlue box
boxpos(-3.0,0,0,1)
#Coral box z軸中心に45度回転
s.materialBegin( col[2] )
s.transformBegin( transform().translation( vector3(3.0,0,0)))
s.transformBegin( transform().rotationAroundZ( pi*45.0/180 ))
s.addObject( s.newObject( "box", [ "position",vector3( -1.0, -1.0, -1.0 ),vector3( 1.0, 1.0, 1.0 )] ) )
s.transformEnd()
s.transformEnd()
s.materialEnd()
#VLightGray box
boxpos(-3,-3,0,3)
#Aquamarine box
boxpos(0,-3,0,4)
#BlueViolet box
boxpos(3,-3,0,5)
#check模様の地面groundをpatchで作成しています。高さ(z軸)を-1.0にしてぴったり立方体とあわせています。
s.materialBegin( ground )
s.addObject( s.newObject( "patch", [ "points",vector3( -50, -50, -1.0 ),vector3( -50, 50, -1.0 ),vector3( 50, -50, -1.0 ),vector3( 50, 50, -1.0 )] ) )
s.materialEnd()
saver = s.newImager( "tga-saver", [ "file", "box_def.tga" ] )
s.imagerBegin( saver )
camera = s.newCamera( "pinhole", [ "eye", vector3( 0, -10, 5 ), "aim", vector3( 0, 0, 0 ) ] )
s.imagerEnd()
s.render( camera, 512, 300 )
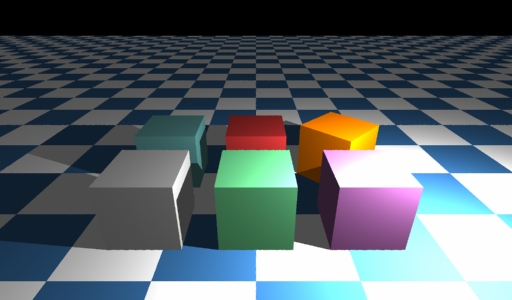
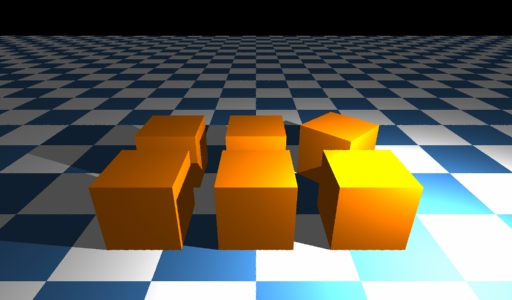
Lightflowで立方体生成関数をつくる その2
マテリアルを1色にしてみた。
col=[plastic,plastic2,plastic3,plastic4,plastic5,plastic6]
の中から、col[2]を選ぶ。
boxpos(0,0,0,2)
boxpos(-3.0,0,0,2)
boxpos(-3,-3,0,2)
boxpos(0,-3,0,2)
のように記述した。
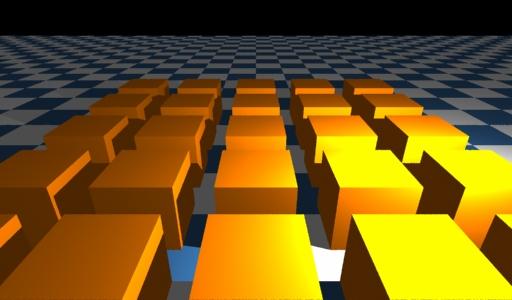
Lightflowで立方体生成関数をつくる その3
立方体を並べてみた。25個並べてみる。色は全部同じ。
#関数定義 ボックスの位置とリストcolのインデックス番号0から5まで
def boxpos(x0,y0,z0,c):
s.materialBegin( col[c] )
s.transformBegin( transform().translation( vector3(x0,y0,z0)))
s.addObject( s.newObject( "box", [ "position",vector3( -1.0, -1.0, -1.0 ),vector3( 1.0, 1.0, 1.0 )] ) )
s.transformEnd()
s.materialEnd()
#Create boxes!! 色は全部同じ
for i in range(-6,7,3):
for k in range(-6,7,3):
boxpos(i,k,0,2)
rangeの部分で-6から6まで3つ飛びで位置を決めている。
試しに、pythonのコマンドラインから
for i in range(-6,7,3):
print i
と入れてどのように動くか試してみるとわかるでしょう。
以下は、サンプルファイルである。
#! /usr/bin/env python
from lightflowPM import *
from math import *
import colorinc
s = scene()
s.lightOn( s.newLight( "point", [ "position", vector3( 5.0, -5.0, 4.0 ), "color", vector3( 300.0, 300.0, 300.0 ) ] ) )
s.lightOn( s.newLight( "ambient", [ "color", vector3( 0.3, 0.3, 0.3 ) ] ) ) #環境光を加える。
plastic = s.newMaterial( "standard",[ "kc", colorinc.Brown,"kd",0.66 ] ) #
plastic2 = s.newMaterial( "standard",[ "kc", colorinc.CadetBlue,"kd",0.66 ] ) #
plastic3 = s.newMaterial( "standard",[ "kc", colorinc.Coral,"kd",0.66 ] ) #
plastic4 = s.newMaterial( "standard",[ "kc", colorinc.VLightGray,"kd",0.66 ] ) #
plastic5 = s.newMaterial( "standard",[ "kc", colorinc.Aquamarine,"kd",0.66 ] ) #
plastic6 = s.newMaterial( "standard",[ "kc", colorinc.BlueViolet,"kd",0.66 ] ) #
#plasticをリスト化した
col=[plastic,plastic2,plastic3,plastic4,plastic5,plastic6]
check_ground=s.newPattern("check",["color",vector3( 0.2, 0.4, 0.6 ),"scale",0.025])
ground=s.newMaterial( "standard",[ "kc", check_ground,"kc",vector3( 1.0, 1.0, 1.0 ),"ka",check_ground ] ) #チェック青と白
#関数定義 ボックスの位置とリストcolのインデックス番号0から5まで
def boxpos(x0,y0,z0,c):
s.materialBegin( col[c] )
s.transformBegin( transform().translation( vector3(x0,y0,z0)))
s.addObject( s.newObject( "box", [ "position",vector3( -1.0, -1.0, -1.0 ),vector3( 1.0, 1.0, 1.0 )] ) )
s.transformEnd()
s.materialEnd()
#Create boxes!!
for i in range(-6,7,3):
for k in range(-6,7,3):
boxpos(i,k,0,2)
#check模様の地面groundをpatchで作成しています。高さ(z軸)を-1.0にしてぴったり立方体とあわせています。
s.materialBegin( ground )
s.addObject( s.newObject( "patch", [ "points",vector3( -50, -50, -1.0 ),vector3( -50, 50, -1.0 ),vector3( 50, -50, -1.0 ),vector3( 50, 50, -1.0 )] ) )
s.materialEnd()
saver = s.newImager( "tga-saver", [ "file", "box_def3.tga" ] )
s.imagerBegin( saver )
camera = s.newCamera( "pinhole", [ "eye", vector3( 0, -10, 5 ), "aim", vector3( 0, 0, 0 ) ] )
s.imagerEnd()
s.render( camera, 512, 300 )
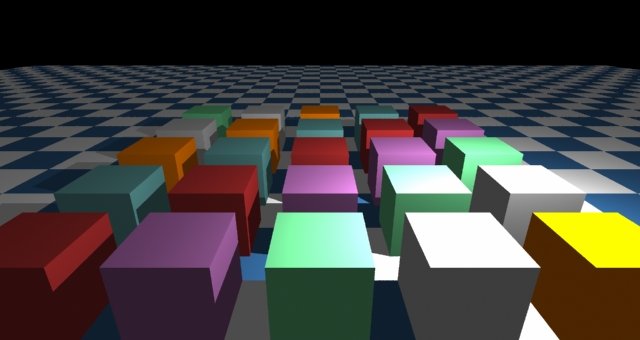
Lightflowで立方体生成関数をつくる その4
立方体をさらに並べてみる。25個並べてみる。色も6色順番に表示している。
#Create boxes!!
c=0
cnt=0
for i in range(-6,7,3):
for k in range(-6,7,3):
boxpos(i,k,0,c)
cnt=cnt+1
c=cnt%6
cnt=cnt+1でカウントを行い、c=cnt%6で、6で割った余りが
0から5までになるので、順番に色を決めていくことができる。
以下は、サンプルファイルである。
#! /usr/bin/env python
from lightflowPM import *
from math import *
import colorinc
s = scene()
s.lightOn( s.newLight( "point", [ "position", vector3( 5.0, -5.0, 6.0 ), "color", vector3( 300.0, 300.0, 300.0 ) ] ) )
s.lightOn( s.newLight( "ambient", [ "color", vector3( 0.3, 0.3, 0.3 ) ] ) ) #環境光を加える。
plastic = s.newMaterial( "standard",[ "kc", colorinc.Brown,"kd",0.66 ] ) #
plastic2 = s.newMaterial( "standard",[ "kc", colorinc.CadetBlue,"kd",0.66 ] ) #
plastic3 = s.newMaterial( "standard",[ "kc", colorinc.Coral,"kd",0.66 ] ) #
plastic4 = s.newMaterial( "standard",[ "kc", colorinc.VLightGray,"kd",0.66 ] ) #
plastic5 = s.newMaterial( "standard",[ "kc", colorinc.Aquamarine,"kd",0.66 ] ) #
plastic6 = s.newMaterial( "standard",[ "kc", colorinc.BlueViolet,"kd",0.66 ] ) #
#plasticをリスト化した
col=[plastic,plastic2,plastic3,plastic4,plastic5,plastic6]
check_ground=s.newPattern("check",["color",vector3( 0.2, 0.4, 0.6 ),"scale",0.025])
ground=s.newMaterial( "standard",[ "kc", check_ground,"kc",vector3( 1.0, 1.0, 1.0 ),"ka",check_ground ] ) #チェック青と白
#関数定義 ボックスの位置とリストcolのインデックス番号0から5まで
def boxpos(x0,y0,z0,c):
s.materialBegin( col[c] )
s.transformBegin( transform().translation( vector3(x0,y0,z0)))
s.addObject( s.newObject( "box", [ "position",vector3( -1.0, -1.0, -1.0 ),vector3( 1.0, 1.0, 1.0 )] ) )
s.transformEnd()
s.materialEnd()
#Create boxes!!
c=0
cnt=0
for i in range(-6,7,3):
for k in range(-6,7,3):
boxpos(i,k,0,c)
cnt=cnt+1
c=cnt%6
#check模様の地面groundをpatchで作成しています。高さ(z軸)を-1.0にしてぴったり立方体とあわせています。
s.materialBegin( ground )
s.addObject( s.newObject( "patch", [ "points",vector3( -50, -50, -1.0 ),vector3( -50, 50, -1.0 ),vector3( 50, -50, -1.0 ),vector3( 50, 50, -1.0 )] ) )
s.materialEnd()
saver = s.newImager( "tga-saver", [ "file", "box_def4.tga" ] )
s.imagerBegin( saver )
camera = s.newCamera( "pinhole", [ "eye", vector3( 0, -12, 5 ), "aim", vector3( 0, 0, 0 ) ] )
s.imagerEnd()
s.render( camera, 640, 340 )
<< 4/9 >>